|
|
|
Multitasking microcontrollers
|
|
|
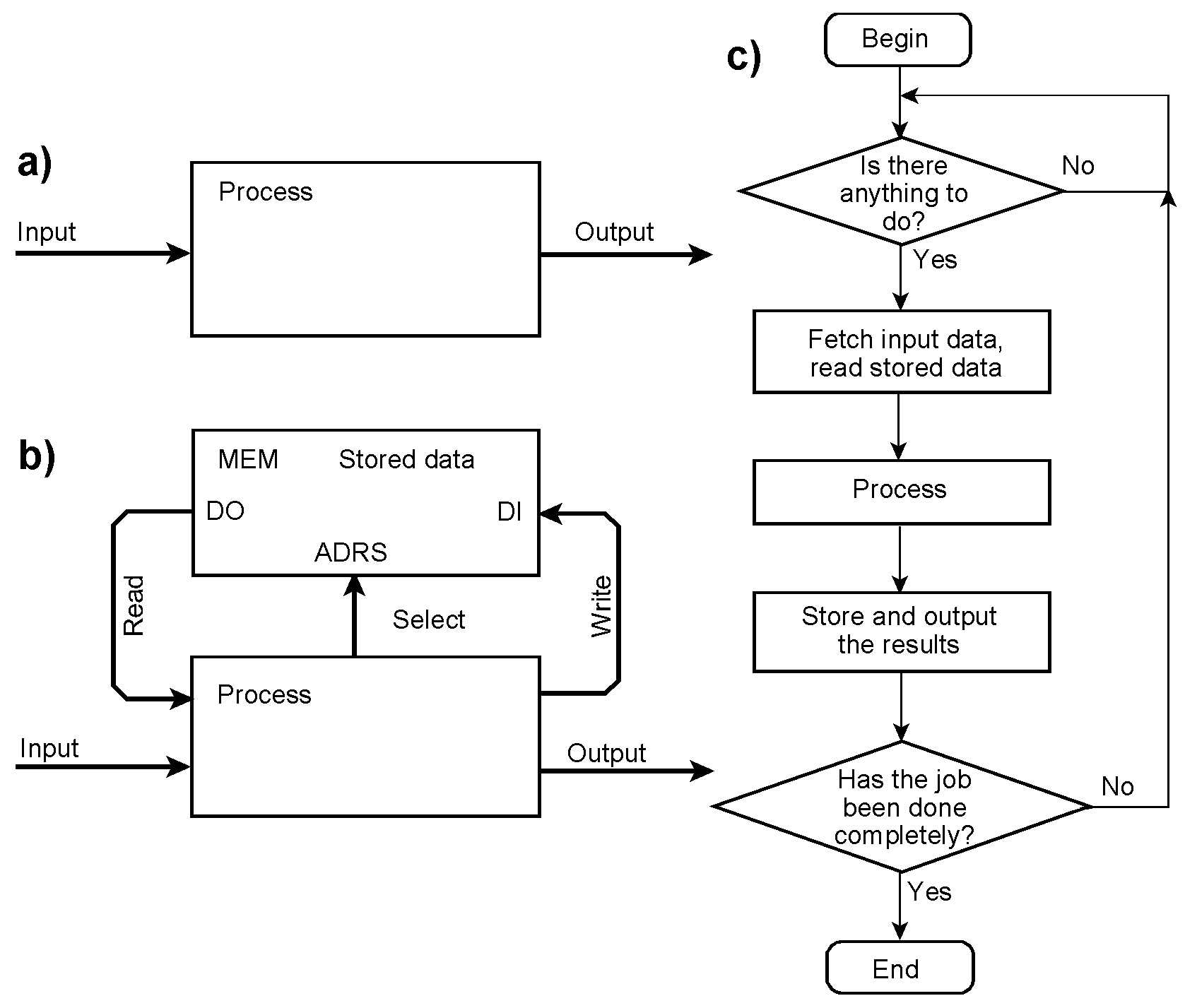
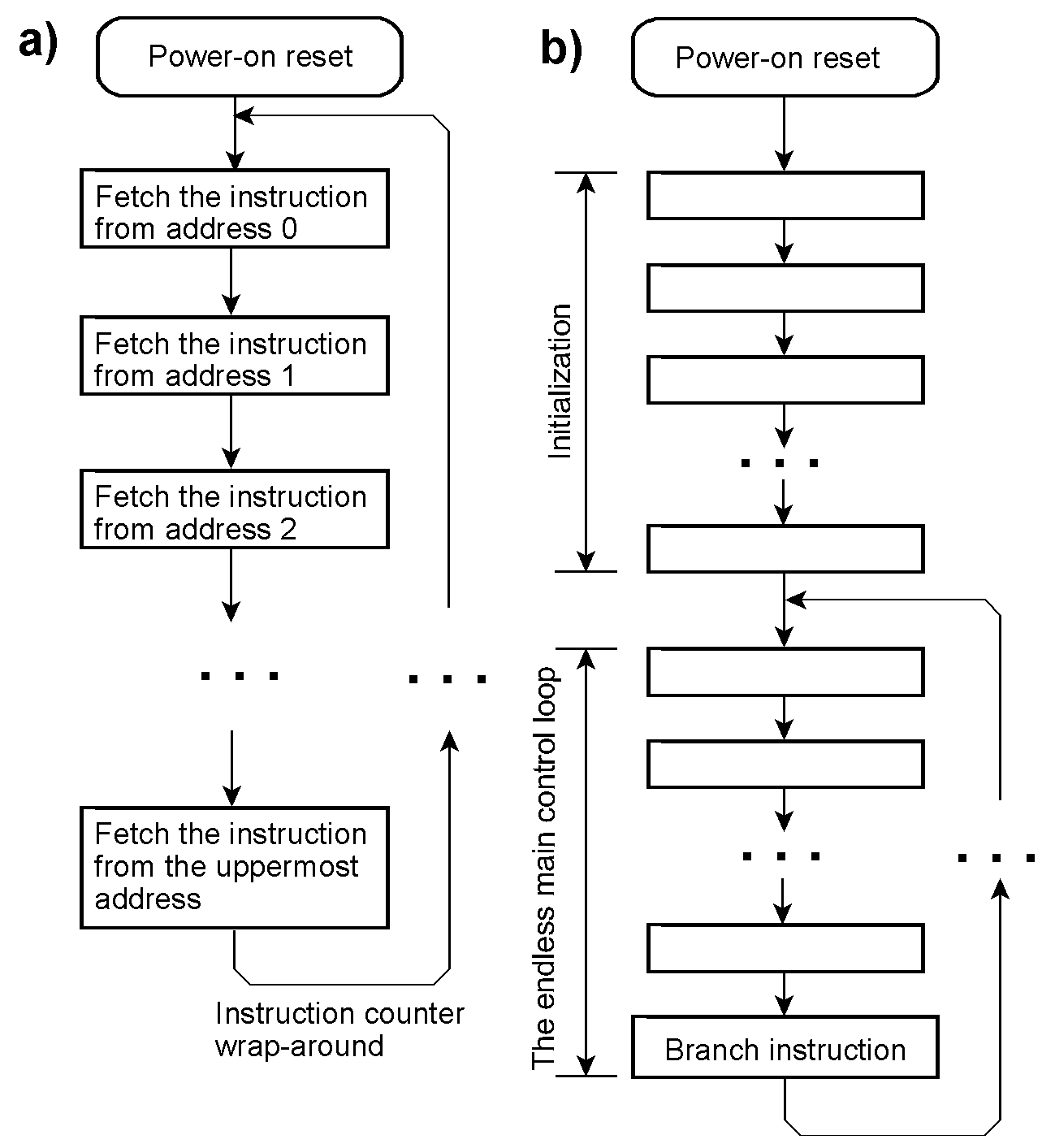
Electronic data processing – the fundamental paradigm Figure 1 Today’s microcontrollers and general-purpose processors are still EDP machines. Once switched on and initially reset, they fetch instruction after instruction out of the memory and execute them. If no branch instruction is included, the instruction counter will sometimes reach the uppermost memory address and wrap around to address zero (a). Consequently, each program must become an endless loop (b).
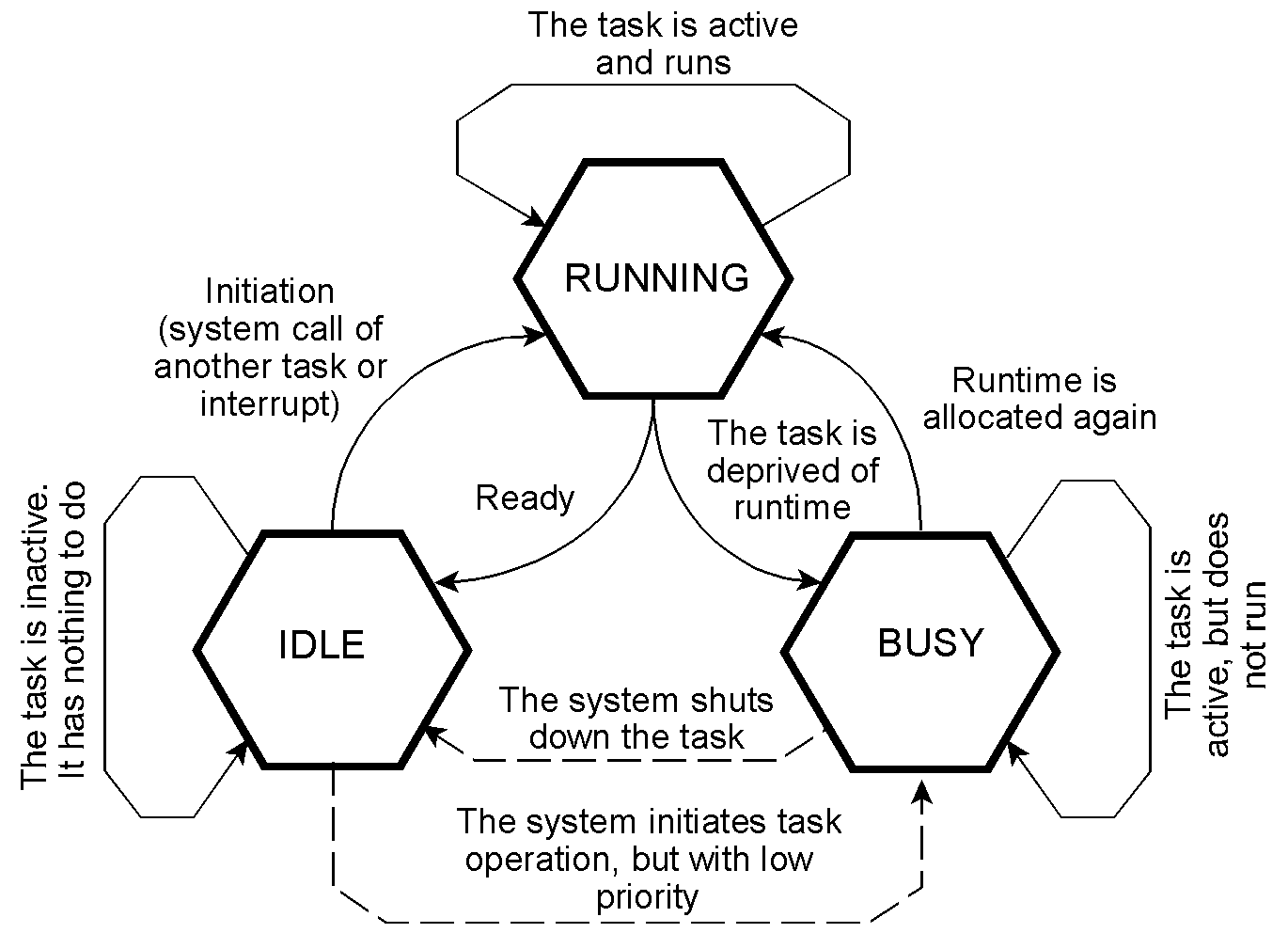
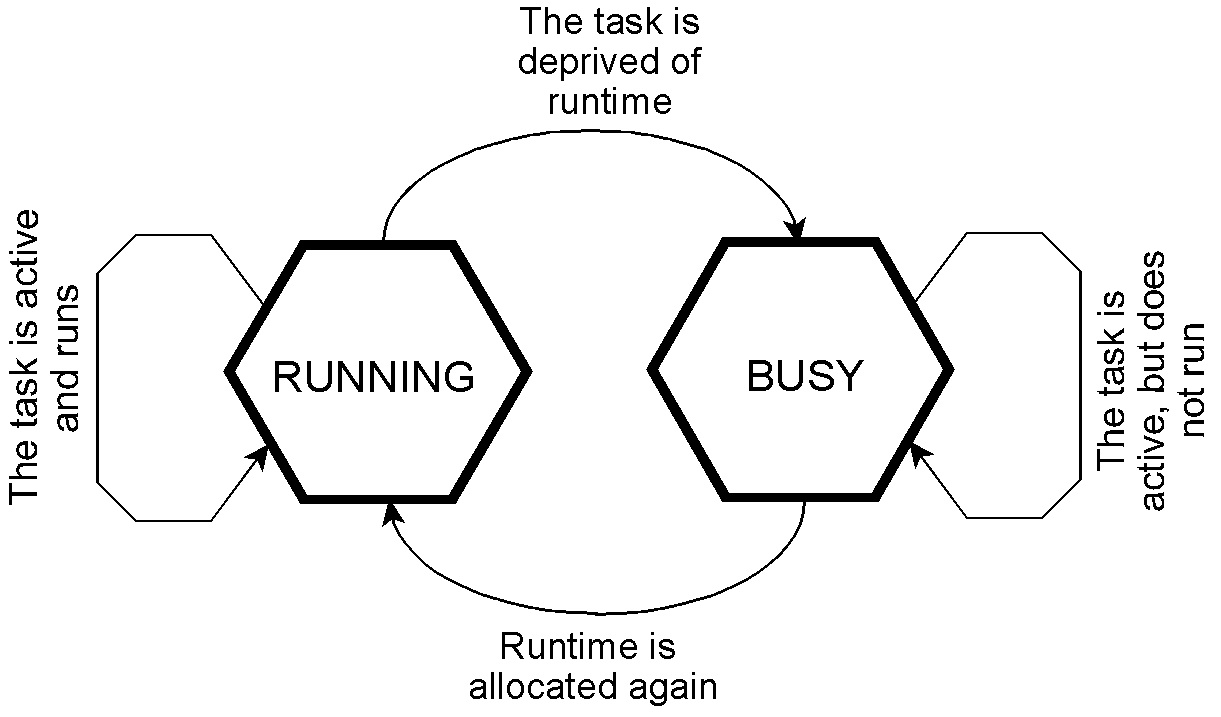
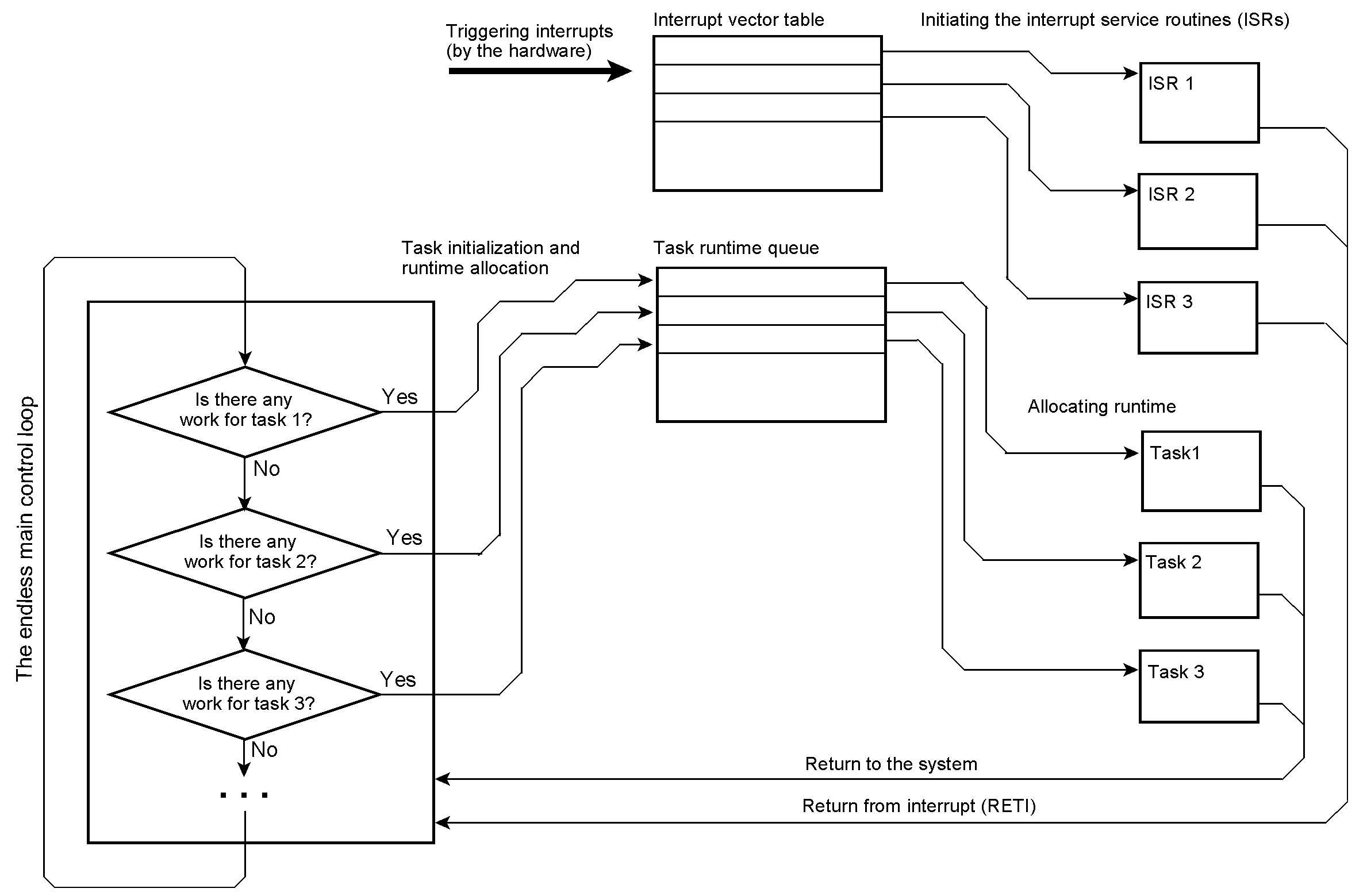
Figure 2 By the way, I have occasionally used the processor behavior shown in (a) for diagnostic purposes. In the appropriate diagnostic mode, an NOP instruction was forced onto the data bus. So, all address lines and some of the address decoding could be traced by an oscilloscope. Multitasking means running multiple programs piecemeal simultaneously in a time-multiplexed fashion. This can be done only by querying in endless loops and by triggering interrupts. Here, we limit ourselves to basic, easy-to-comprehend principles of operation. Tasks are comparatively small, not overly complex programs. Their runtime environments are called partitions. They are, so to speak, prefabricated areas in the memory, tailored to the demands of the particular tasks. Princial task state models Here, we will discuss only straightforward state models that are appropriate for small microcontroller projects without advanced operating systems. The following state diagrams illustrate states and state transitions of a single task, regardless of how the transitions are triggered, be it by programmed branching, by system calls, or by interrupts. Figure 2 shows all the states a task can enter. In the idle state, it is inactive, has nothing to do, and will not claim runtime. In the running state, it is active and runs on the processor. When it is deprived of runtime, while still active, it transitions to the busy state, awaiting a new opportunity to proceed. The task can command a state transition only if it is running. All other state transitions must be caused from the outside. Only an interrupt or a system call from another task may awaken the task out of the idle state and make it run. Only a running task may make itself idle, for example, by a READY system call, as depicted here. A more advanced system may cancel a task's operation by changing its state from busy to idle. Conversely, it may activate the task by making it busy, so it can participate in runtime allocation.
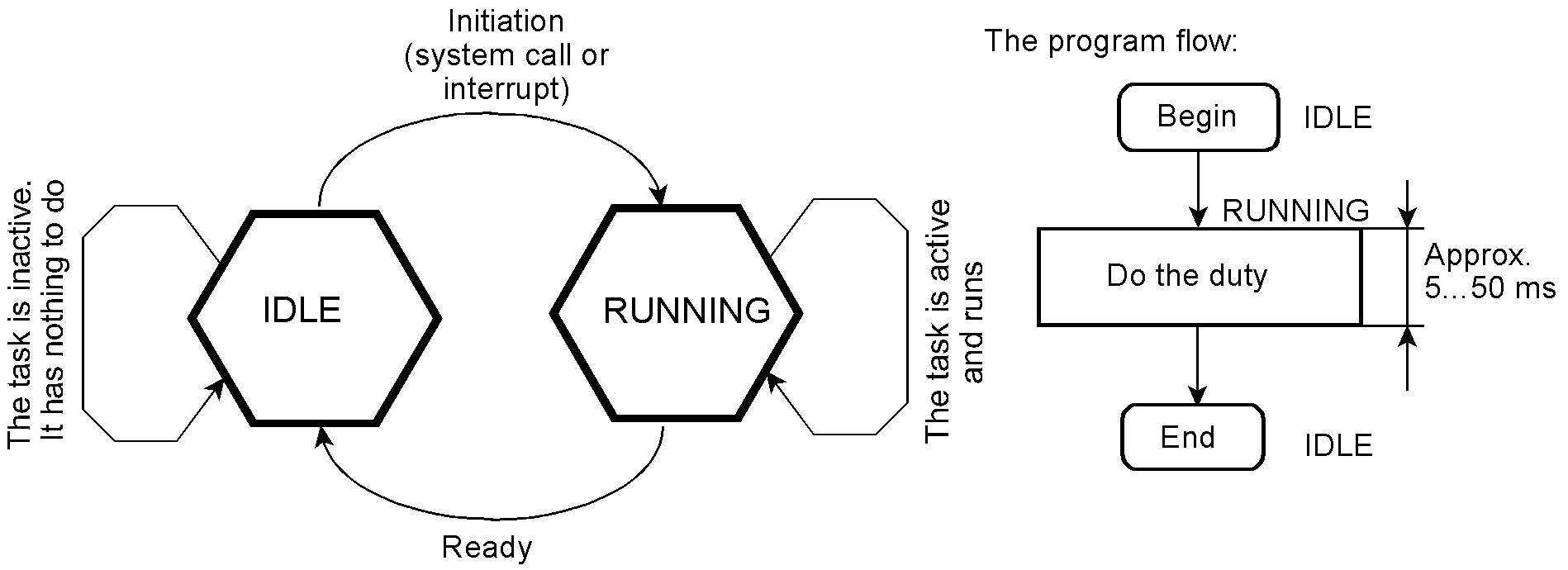
Figure 3 The state model can be simplified by omitting one of the states. According to Figure 4, the task has no busy state. To perform a particular action, it must be awakened from the idle state. When it has done its duty, it becomes idle again. This state model is adequate if the tasks are only short programs that always come to an end, say, after a few milliseconds. They do not need so much runtime that it must be shared between the tasks, and hence allocated. On the other hand, some provisions outside of those tasks are required to initiate them. It could be done by an endless main control loop or by interrupts.
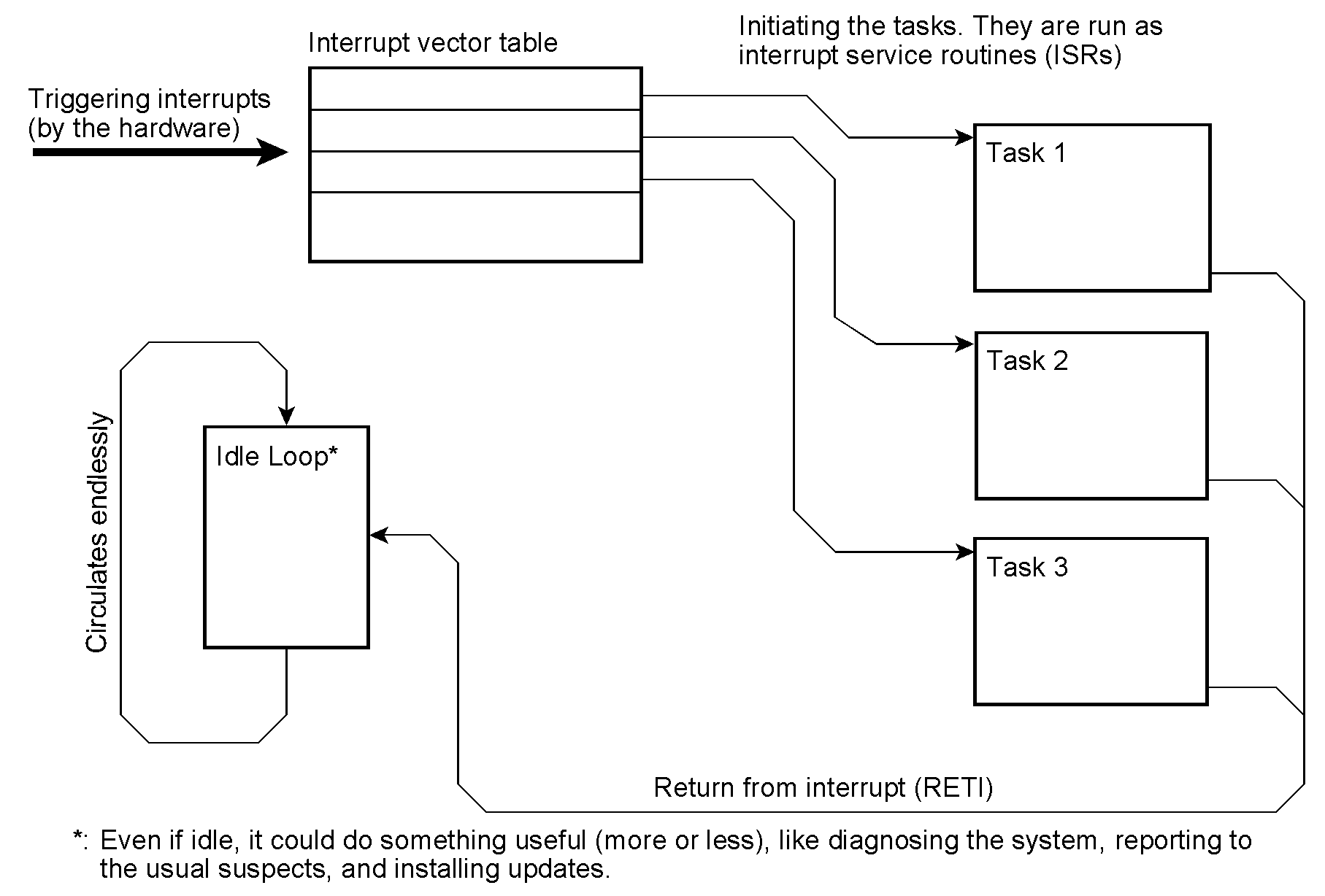
Figure 4 To be able to do something, a program must run. The state model of shown above requires endlessly running programs outside the tasks or interrupt provisions that initiate all the task operations. An alternative idea is to let all tasks run endlessly, so they can manage themselves. The only provision outside is a timer-based interrupt. Figure 5 shows the appropriate state model. From the beginning, that is, after power-on reset and initialization, all tasks are running in endless loops. They could be thought of as being executed in virtual machines, each with its own main control loop. The state transitions are only caused by the timer-based interrupts.
Figure 5 Each of the two-state models has its pros and cons (Table 1). Thus, the choice depends on the application requirements and the hardware platform.
Table 1 Some typical patterns of control loops
Figure 6
Figure 7
Figure 8
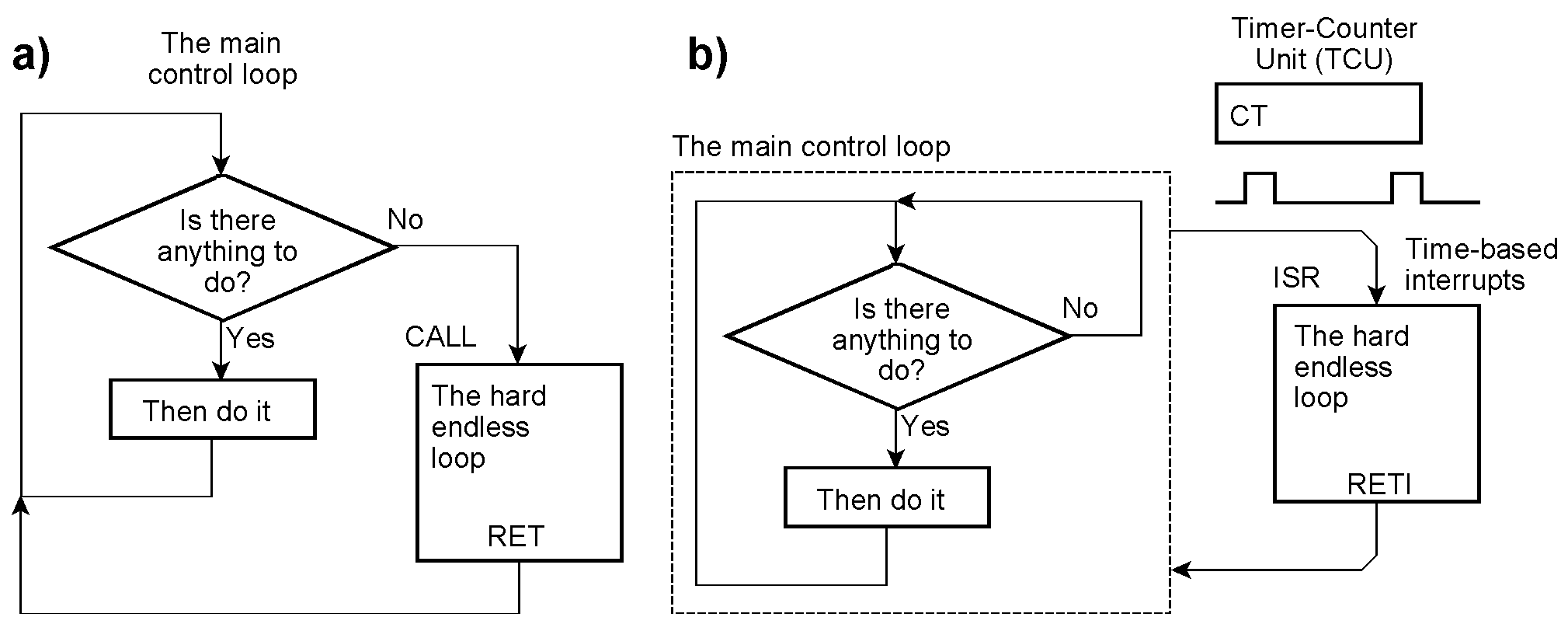
Figure 9 Invoking hard endless loops
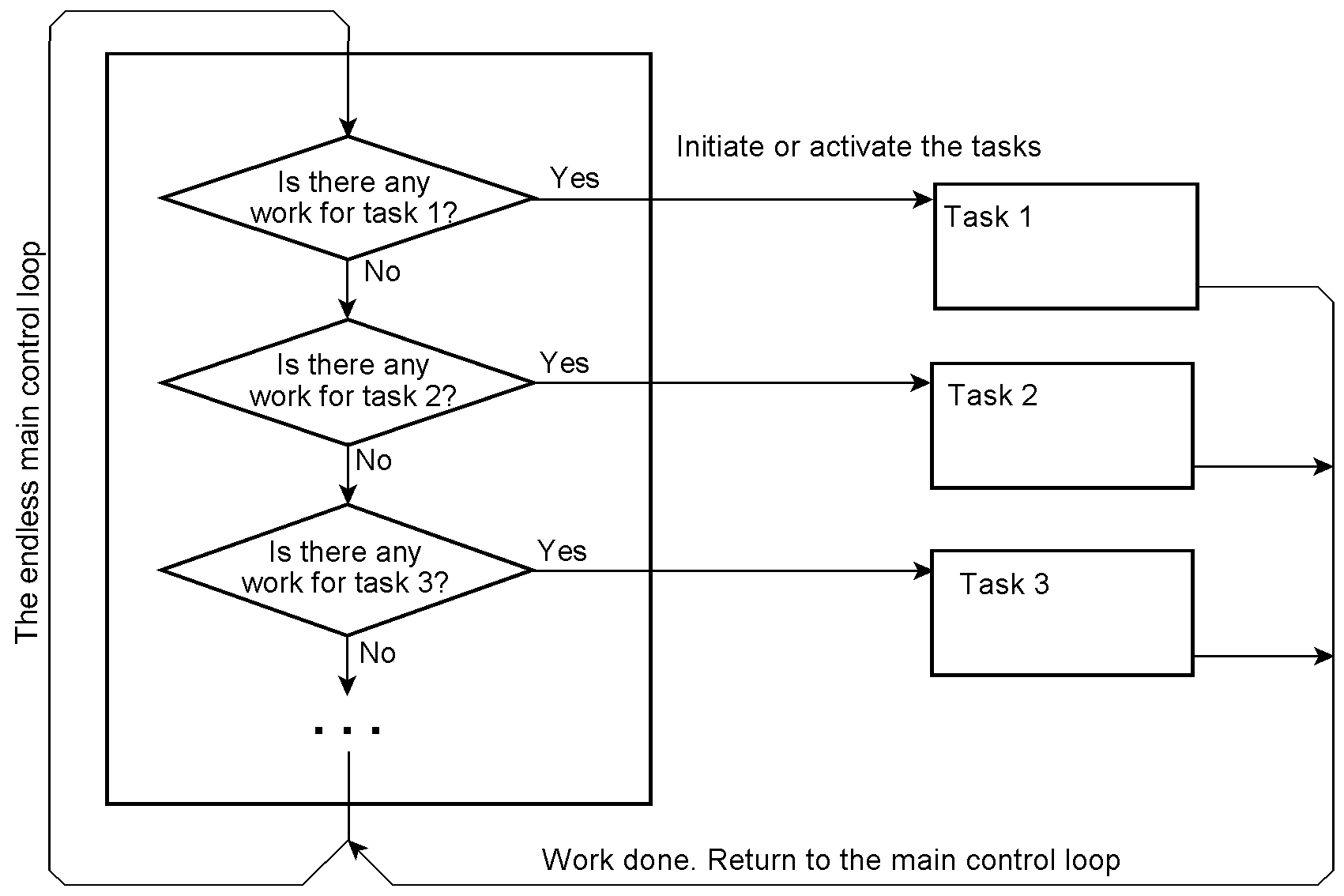
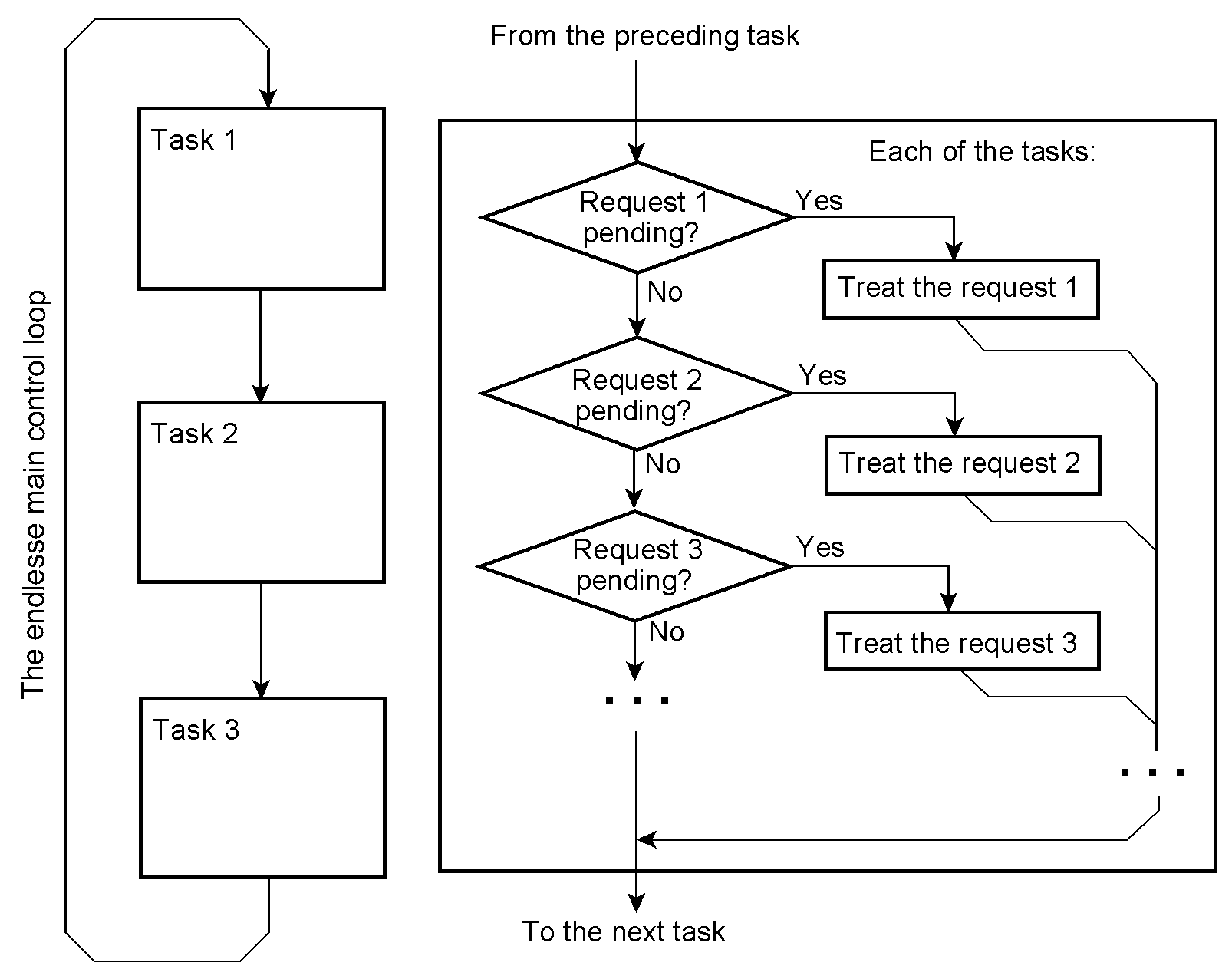
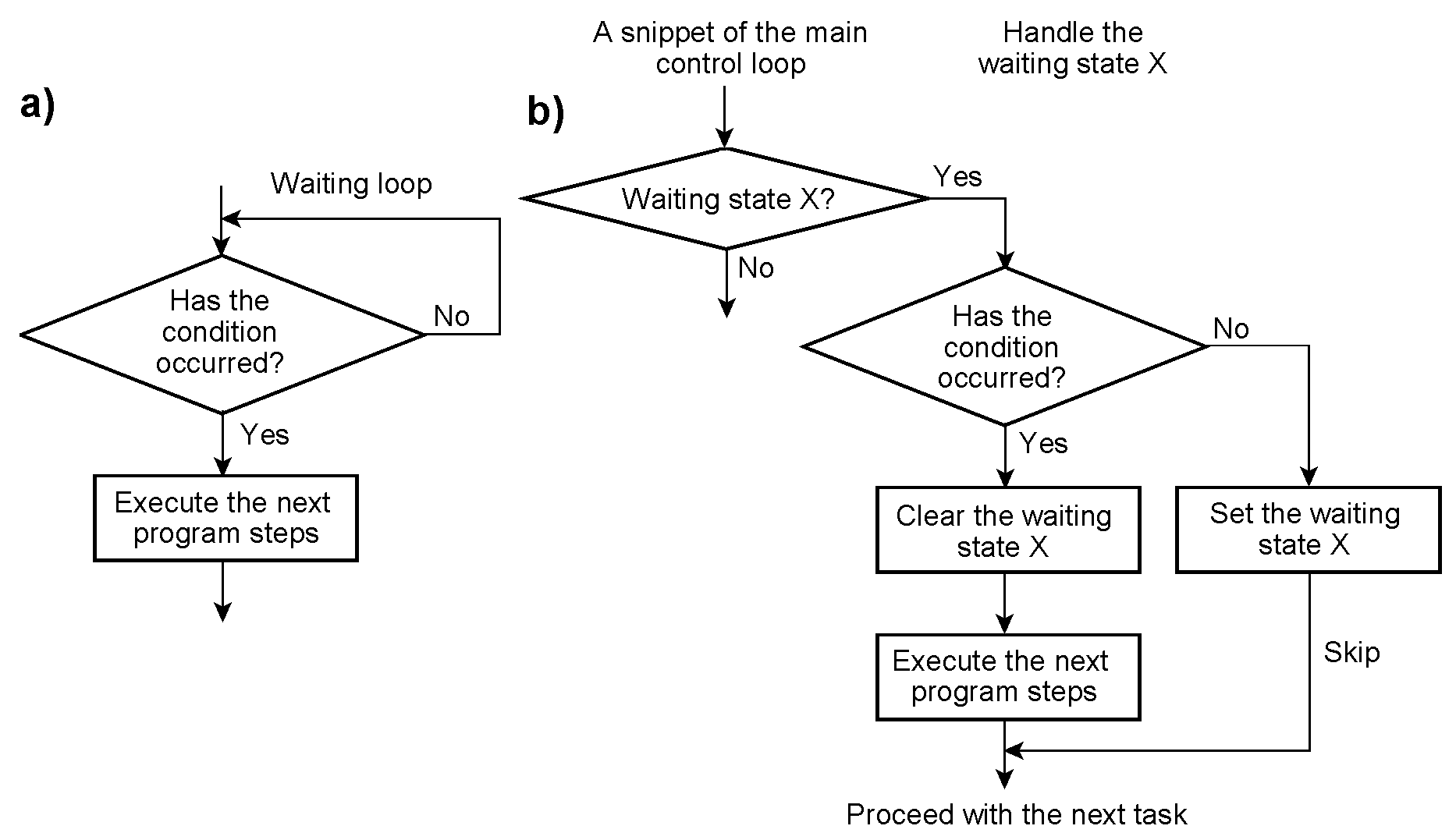
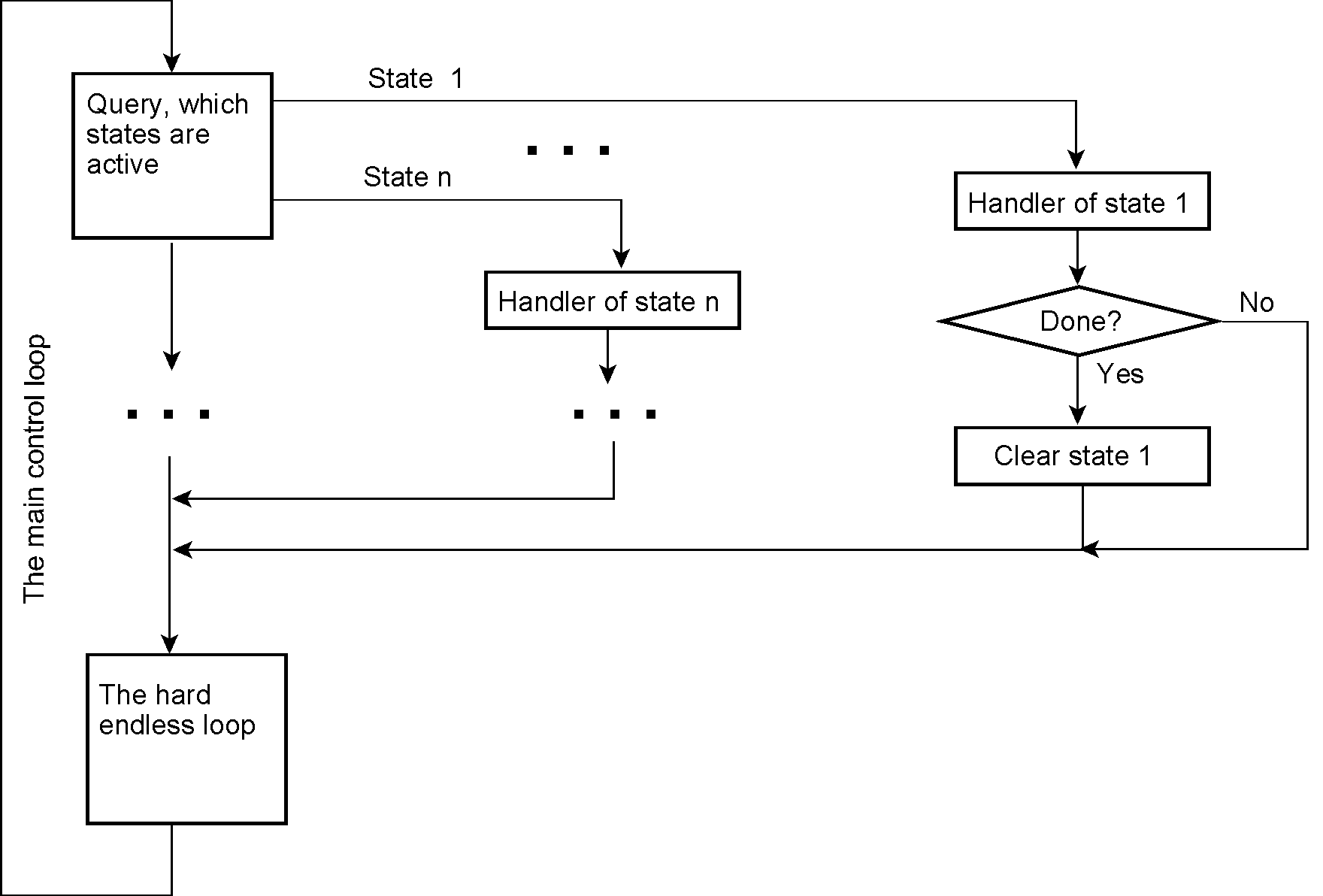
Figure 10 Implementing the hard endless loop as an interrupt service routine (ISR) is straightforward. Say you need 20 passes per second, then initialize a timer-counter unit (TCU) of your microcontroller to trigger an interrupt every 50 milliseconds. It could, however, happen that the interrupt occurs, with respect to other activities, at an inappropriate time, or that the ISR eats up too much runtime, which is momentarily not acceptable. Of course, with a powerful processor and an appropriate RTOS, such problems could be solved as a matter of routine. But here we talk about small microcontrollers and low-footprint programs. Alternatively, you may resort to cooperative multitasking. This way, you have the runtime allocation completely under program control (it is the same principle as implemented in Windows 3.x and the first Macs, but considerably more simplified). Here, too, however, are chances to commit annoying mistakes. In Figure 9 of the printed article, we have sketched the most basic approach to cooperative multitasking: to insert the hard endless loop (as a subroutine) into each waiting loop. Sometimes, that may work flawlessly. On the other hand, the inserted subroutine may consume scarce runtime that would be better spent running other tasks. In other words, it could be called more often than necessary. When waiting loops eat up precious runtime, you must not program as shown in Figure 9 mentioned above or in Figure 11a below. If the waiting condition is not met, the other tasks must be given sufficient runtime. It could be done by dividing the application program into states and state handlers. This is illustrated in Figure 11b by the example of a waiting state X. Instead of circulation in the waiting loop, as shown in Figure 11a, and thus wasting runtime, the application program established a waiting state (as an additional program variable). If the condition to be expected has occurred, the waiting state is cleared, and the program proceeds with the next step. Otherwise, the waiting state is retained, and the next program step is skipped. Figure 12 depicts how the states, their handlers, the hard endless loop and the main control loop may fit together. Here, the hard endless loop is passed as a part of the main control loop, thus no runtime is wasted. The main control loop could even decide after how many passes the hard endless loop needs to be called. Waiting and other time-consuming activities are called via states. Within the state handlers, waiting loops are not permitted.
Figure 11
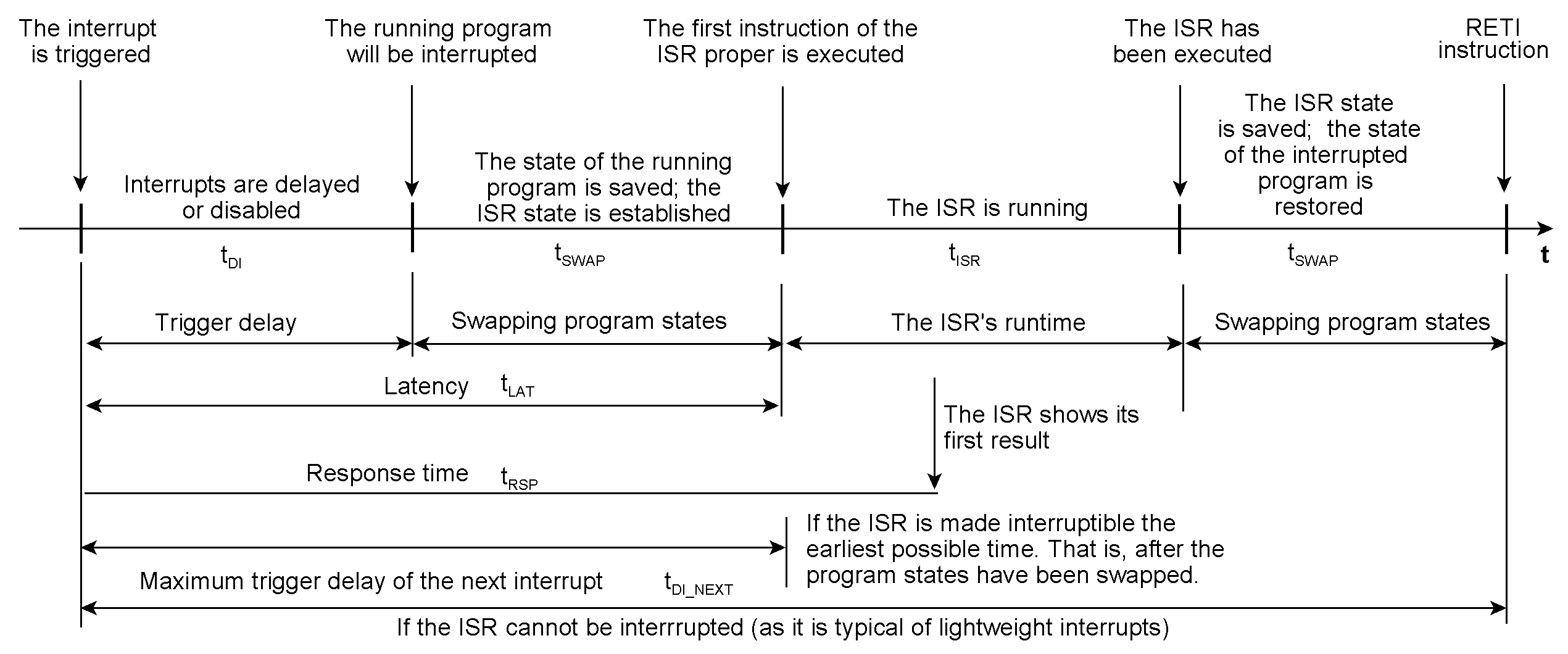
Figure 12 The timing budget of an interrupt service routine (ISR)
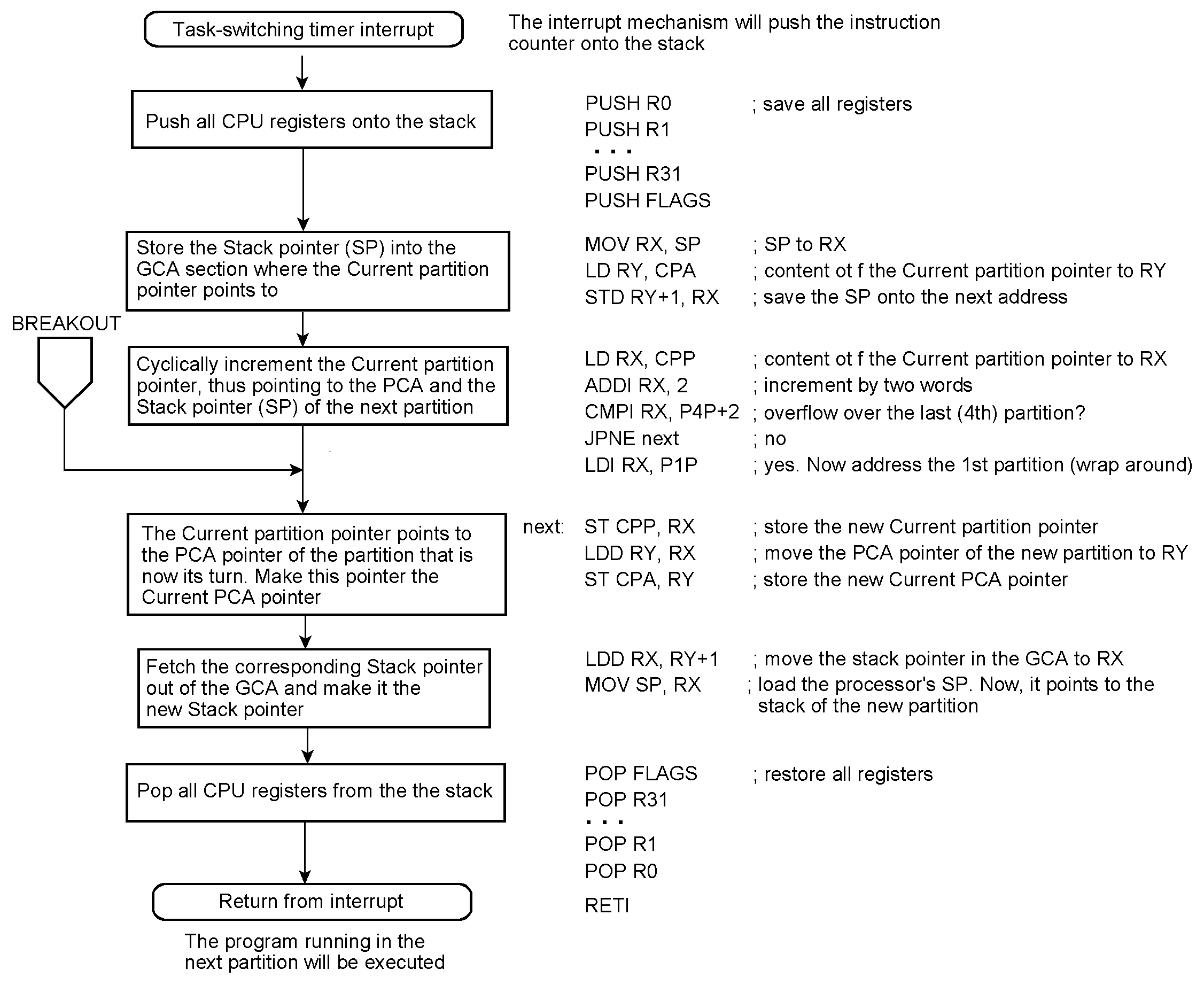
Figure 13 Straightforward virtual machines by time slicing RX designates the accumulator. RY designates a base address or index register. SP is the stack pointer. PUSH, POP, MOV, LD, ST, JMP, JPNE have their usual meanings. The first parameter is the destination. STD = Store indirect with displacement. Syntax: STD index register+displacement, data register. LDD = Load indirect with displacement. Syntax: LDD data register, index register+displacement, data register. ADDI = Add an immediate value. Syntax: ADDI data register, immediate value LDI = Load an immediate value. Syntax: LDI data register, immediate value. CMPI = Compare with an immediate value. Syntax: CMPI data register, immediate value.
Figure 14
Figure 15
Figure 16
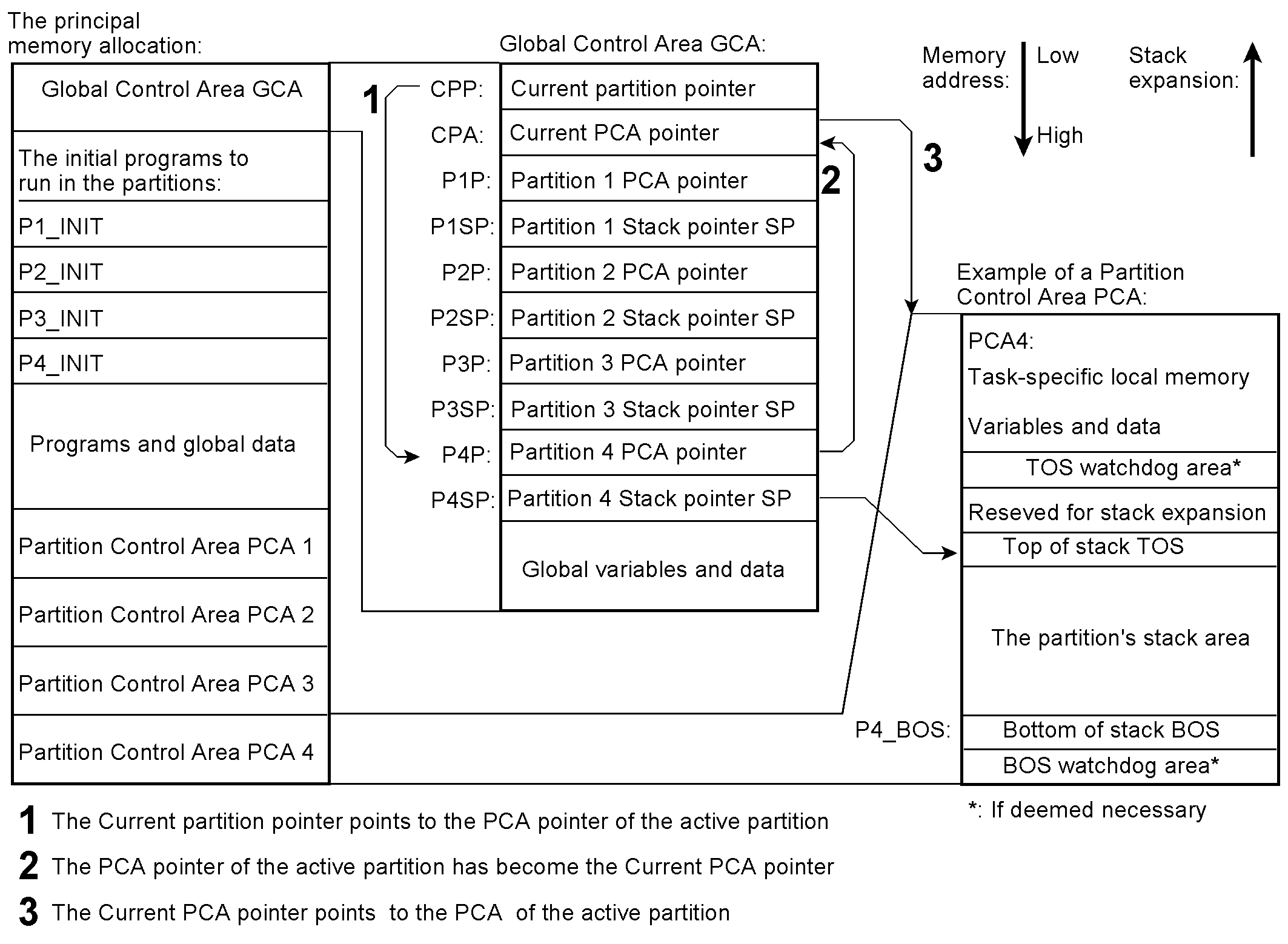
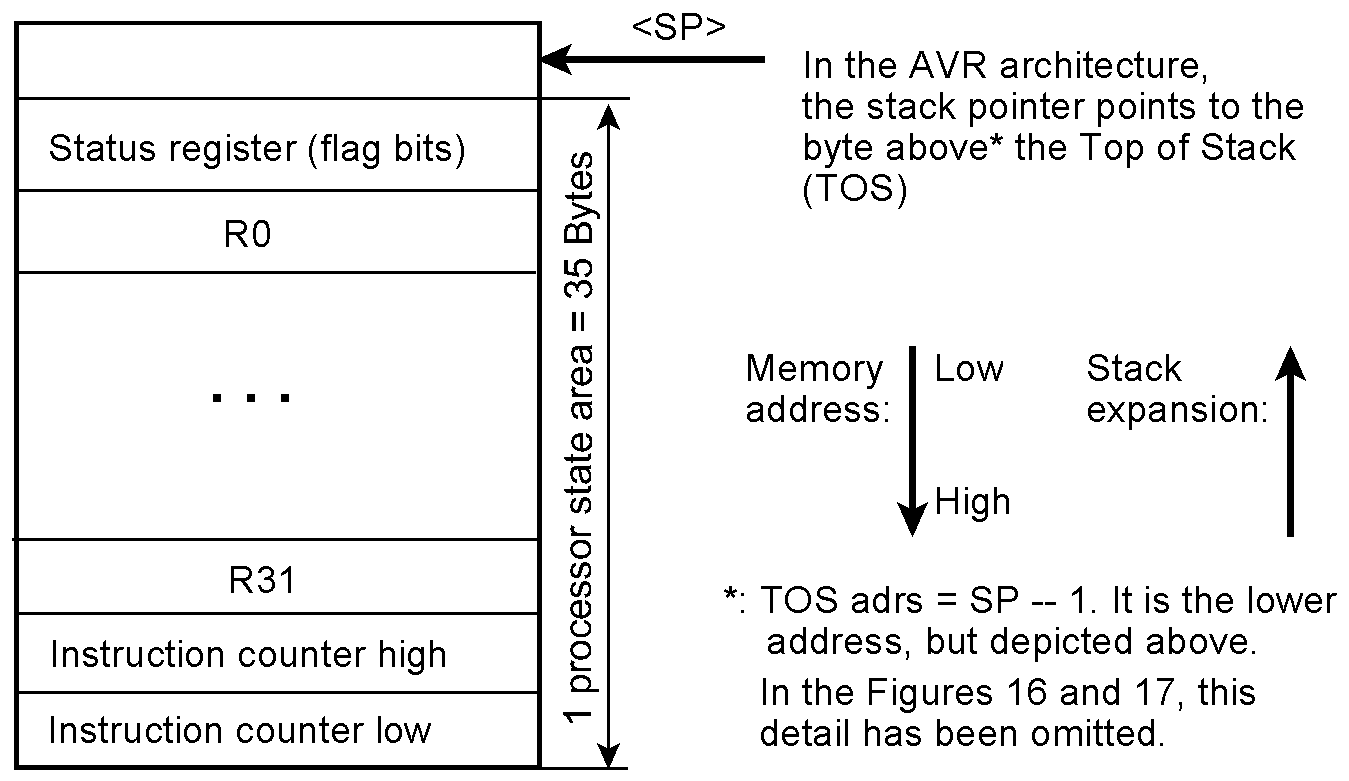
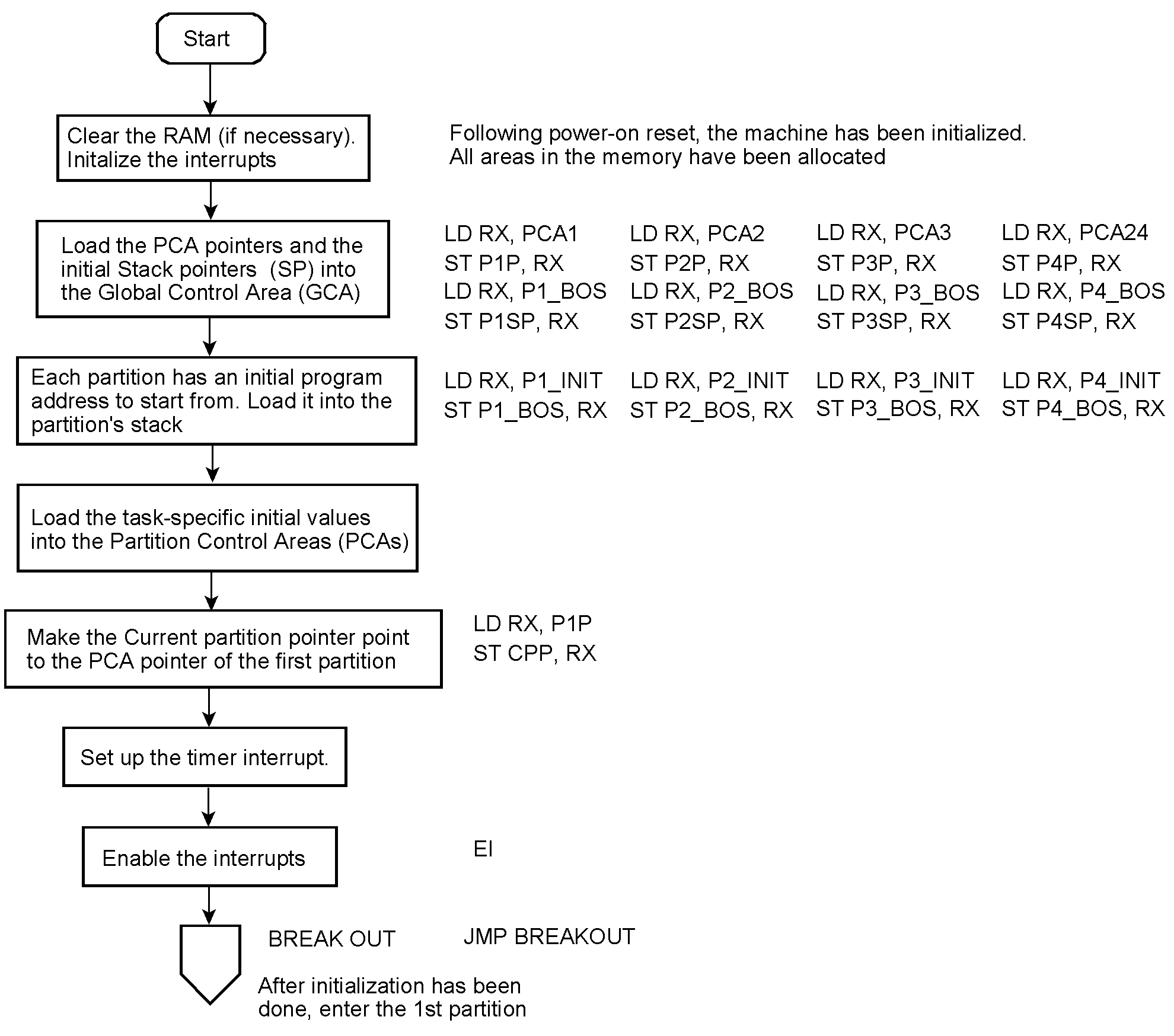
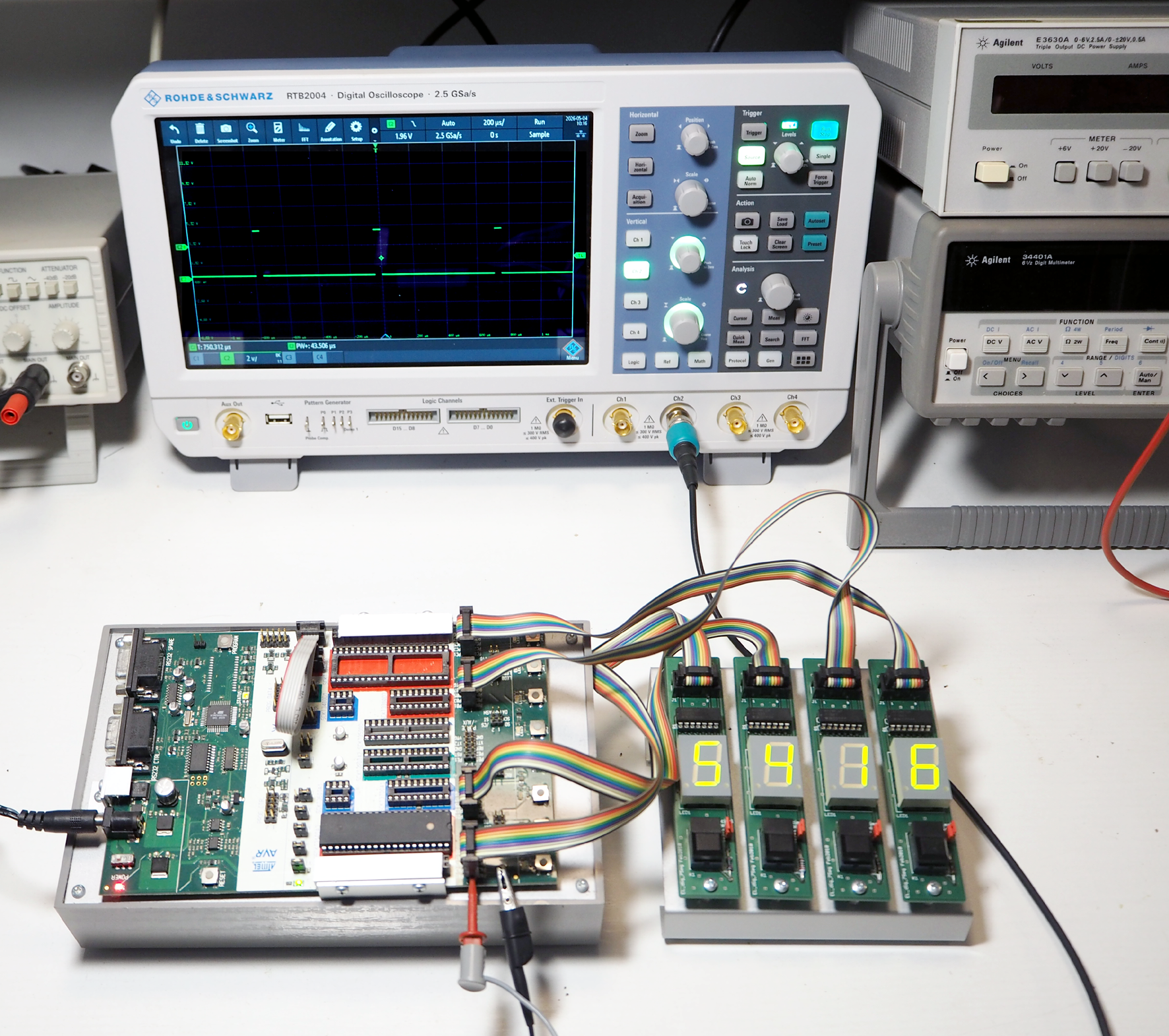
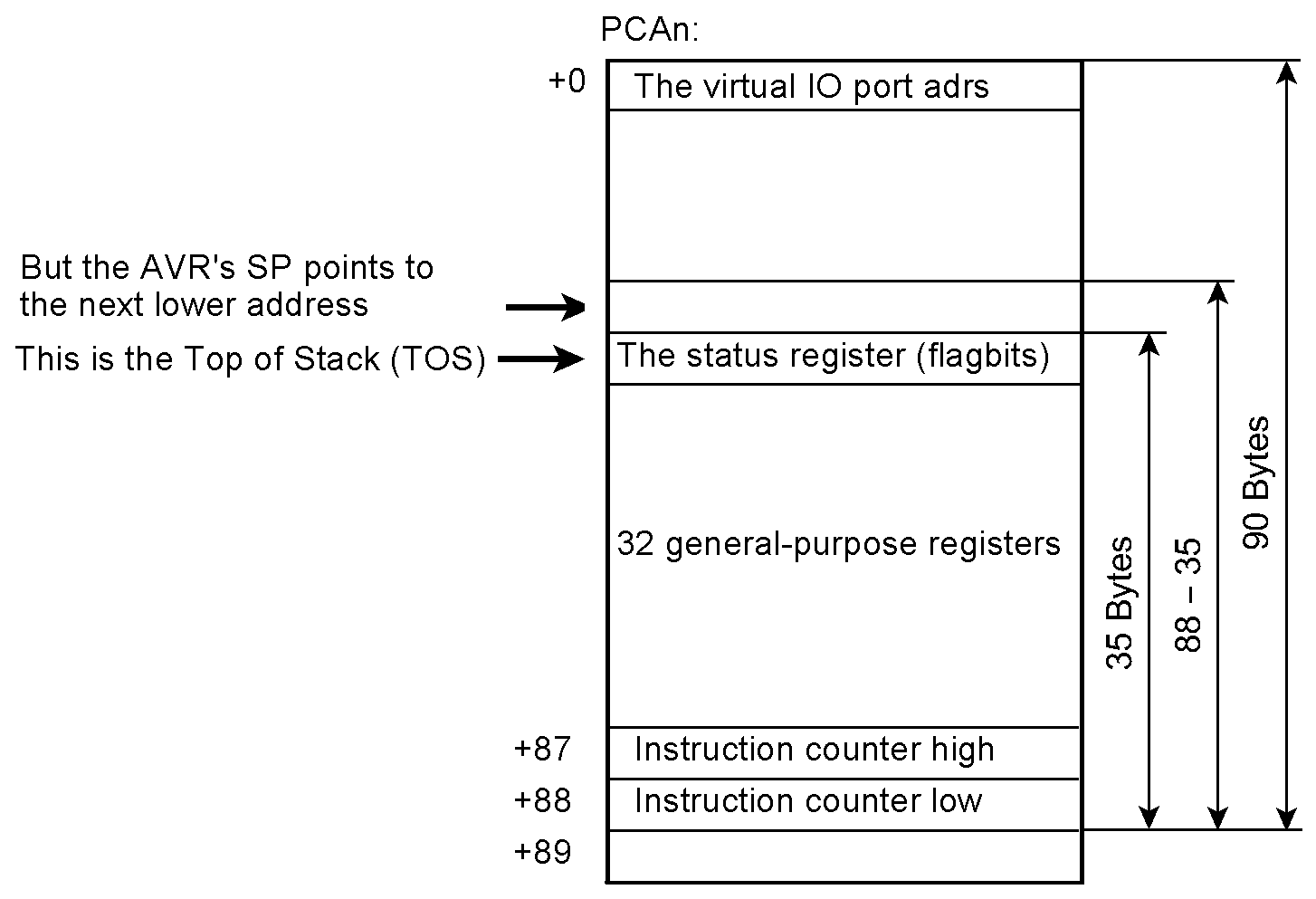
Figure 17 The AVR multitasking example All dice are supported by only one common application program, which is executed for each die separately. Therefore, the program cannot refer to particular I/O addresses. The problem has been solved by resorting to the port’s memory addresses (Table 2). In the source code, they are dubbed virtual port addresses. Each partition control area (PCA) has been assigned 90 bytes. The stack is located at the upper end. Address calculation to initialize the stack correctly is somewaht tricky, as illustrated in Figure 19.
Figure 18
Figure 19
Table 2 The source program can be downloaded as avr_example_01.asm.
|
|
|
|
Download the Internet addendum to the CC article Download the assembler source program |